Comme à chaque 14 juillet, mon radar virtuel me permet d'observer la préparation du défilé aérien avec ici encore une couverture permettant de bien identifier quelques zones d'attente.

Et puis le départ du défilé aérien jusqu'au final.


Comme à chaque 14 juillet, mon radar virtuel me permet d'observer la préparation du défilé aérien avec ici encore une couverture permettant de bien identifier quelques zones d'attente.
Comme à chaque 14 juillet, mon radar virtuel me permet d'observer la préparation du défilé aérien avec cette année l'identification d'un drone 'aerobot' non identifié l'année dernière.
Les avions sont positionnés sur au moins cinq zones jusqu'à 10h30 environ avec le drone tournant du coté de Magny-en-Vexin.







En ce jour de défilé sur les Champs-Élysées, mes récepteurs ADS-B se sont révélés bien utiles pour observer la préparation du survol de Paris, du moins pour les avions disposants d'un balise ce qui n'est pas le cas des chasseurs.
1- Hippodrome à l'ouest de Paris

2- Poursuite de l'hippodrome

3- Top départ

4- Retour

La mise à jour de la configuration de l'un des récepteurs ADS-B avec une clef RadarBox intégrant un filtre 1090Mhz en entrée sans aucune modification permet d'attendre les performances du récepteur RadarCape, du moins en terme de positions signalées sur FlightAware.

Ce week-end a été l'occasion de mettre à jour ma configuration ADS-B constituée d'un Radarcape et d'un Raspberry PI doté d'une clef SDR, les récepteurs étant raccordés sur une antenne colinéaire placée à 3m au-dessus du toit, soit à plus de 170m d'altitude au sud de Paris. Autant dire un dégagement parfait sur 360°. Un splitter 'maison' est ici utilisé.
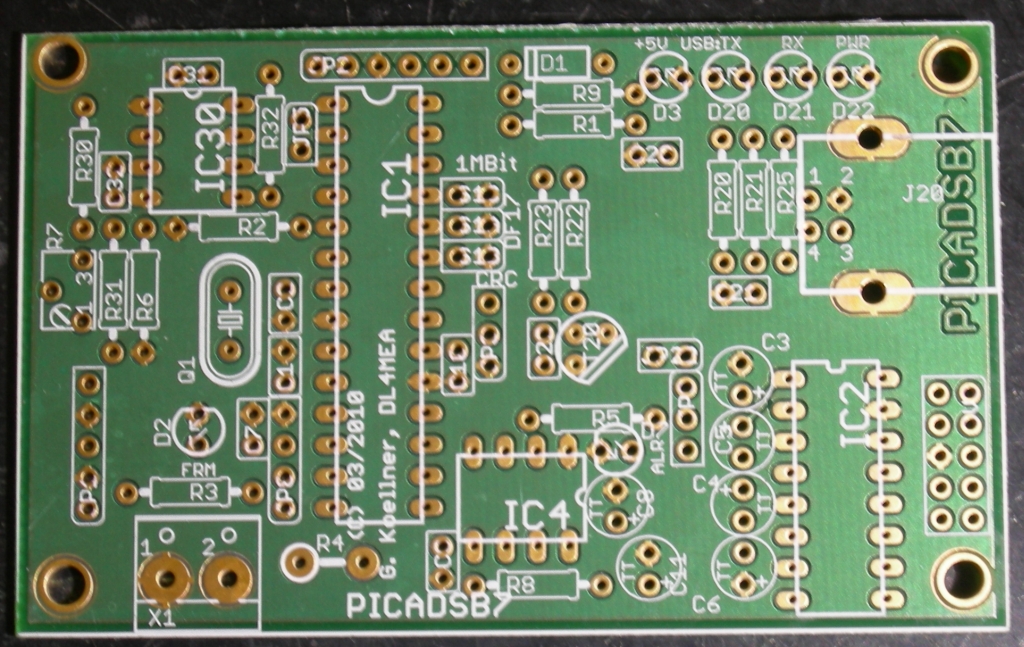
Ayant eu l'occasion d'acheter un lot de SDR, j'ai eu la bonne surprise de trouver dans le colis une clef RadarBox. Il s'agit d'une clef SDR incorporant un filtre 1090Mhz en entrée. J'ai donc remplacé la bonne vieille clef à base RTL-2832 par celle-ci avec une très légère amélioration. Le Raspberry Pi devrait se voir doter sous peu d'un boitier moins fragile que le boitier actuel en plexiglas.

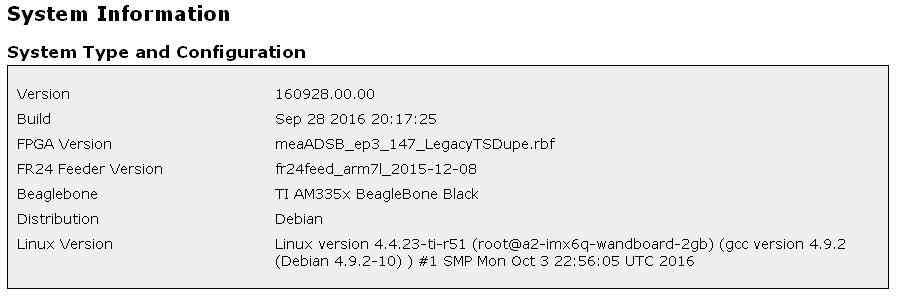
Pour ce qui concerne le Radarcape, la version Debian 8 installée n'étant plus supportée, j'ai effectué non sans difficulté la mise à jour sur une Debian 10. J'ai rapidement abandonné l'idée d'une reconfiguration complète, une image pré-configurée étant proposé par 'JetVision', le fournisseur de ce récepteur.
Cette image est parfaite pour préparer une configuration spécifique, à savoir: installation d'une clef Wifi et configuration du réseau associé avec une adresse IP statique, configuration du réseau Ethernet avec une seconde adresse IP statique, désactivation du réseau IP V6, modification des comptes d'accès par défaut, installation de quelques utilitaires pratiques.
Une première configuration s'effectue en SSH sur l'adresse 192.168.73.1 affectée sur la connexion USB. Elle permet de configurer le réseau Ethernet sur son adresse statique via la commande 'connmanctl ethernet.... --ipv4 manual 192.168.1.X 255.255.255.0 192.168.1.1'. On en profite pour changer aussi le serveur DNS via un 'connmanctl ethernet.... --nameserver 192.168.1.1 8.8.8.8' et pour désactiver IP V6 via un 'connmanctl ethernet.... --ipv6 off'. Et enfin pour changer le mot de passe du compte 'jetvision' ('jetvision' par défaut), créer un compte dédié autorisé en sudo et modifier le mot de passe du compte 'root' ('radarcape' par défaut)
La configuration définitive s'effectue après redémarrage et la connexion du Radarcape sur le réseau Ethernet. On peut alors installer les paquetages requis dont le firmware du dongle wifi via un 'apt install firmware-realtek'. Le dongle peut ensuite être connecté en vérifiant qu'il est bien activé par un 'dmesg'. La configuration du Wifi peut commencer via les commandes 'connmanctl' ad'hoc en n'oubliant pas de lancer un 'connmanctl scan wifi' pour créer les tables de configuration. Il s'agira ensuite de reconfigurer Radarcape en activant les feeds si besoin. Dans mon cas, l'identifiant de connexion FlighAware (feeder-id) est récupéré sur le site FlighAware puis copié dans le fichier '/etc/piaware.conf' afin d'alimenter le compte attaché au Radarcape.

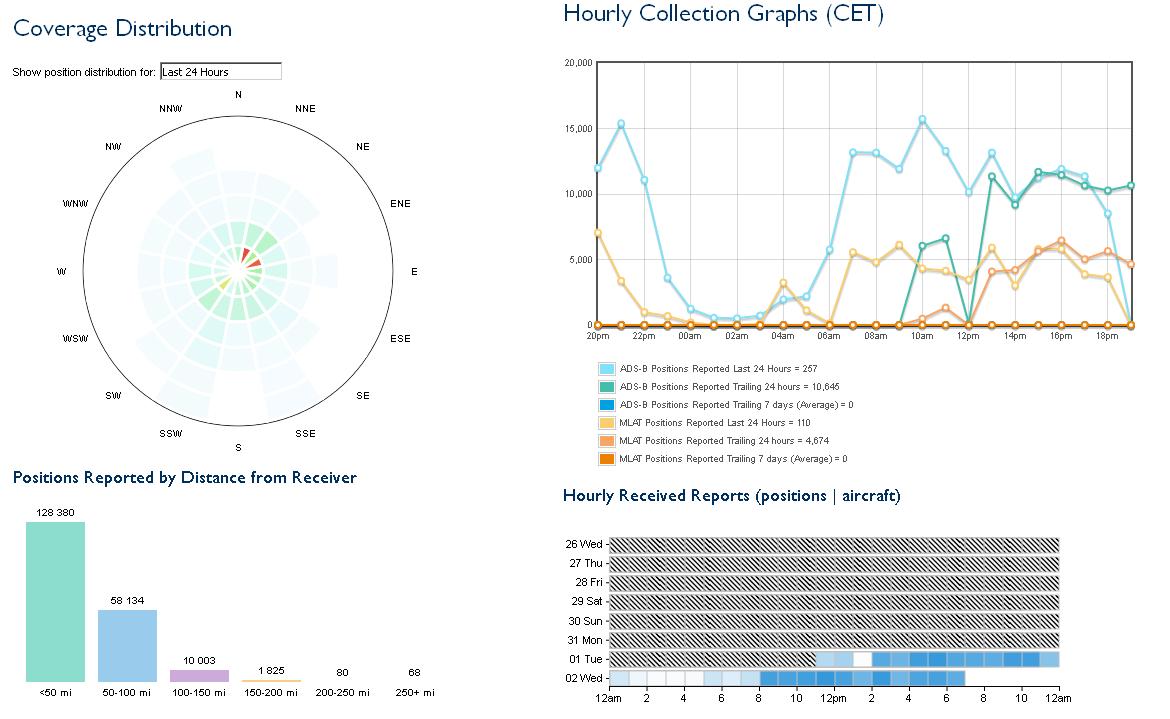
On vérifiera que tout fonctionne bien en se connectant sur le Radarcape puis sur le site de feed pour contrôler que les données sont bien transmises. Les fonctions d'affichage de l'état du système sont bien pratiques pour cela.


Les effets du nouveau confinement commencent à être visibles avec moins d'une centaine d'avions suivis sur mon RadarCape. L'impact reste cependant moindre que lors du tout premier confinement mais le nombre de vols décroit très régulièrement depuis un mois.

Chiffres à comparer à ceux du mois de mai.













| - Signal injecté sur l'antenne: | -60dB |
| - Sortie du premier MMIC: | -42dB |
| - Sortie du premier filtre: | -52dB |
| - Sortie du second MMIC: | -33dB |











{kind=link}