J'ai eu l'occasion d'acquérir l'année dernière un positionneur de camera de surveillance de type Pan/Tilt de bonne facture et suffisamment robuste pour en faire un positionneur Azimuth/Elevation pour quelques antennes légères.
Les deux motoréducteurs synchrones sont logés dans un boîtier étanche moulé en alumiun, les deux axes de sorties sont montés sur roulements à billes et un joint à lèvre assure l'étanchéité. Deux potentiomètres de recopie sont installés et couplés par le biais d'un joint glissant. Il est ainsi possible de déplacer les butées d'arrêt sans avoir à désacoupler le potentiometre associé à cet axe. Il suffira d'amener le système sur l'une puis sur l'autre des deux butées pour repositionner le potentiomètre sans risque de destruction. Le seul défaut de ce positionneur est l'existence d'un angle mort d'environ 10° en azimuth.

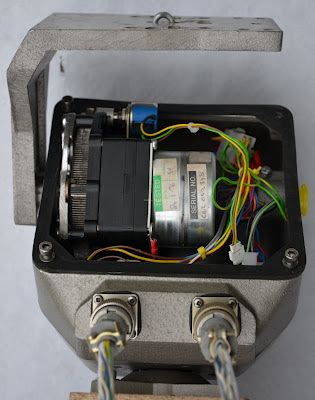
La seule modification apportée à l'ensemble a consisté à remplacer les connecteurs de raccordement d'origine - connecteur DIN de type audio - par des connecteurs professionnels, les moteurs synchrones étant alimentés en 220V. La liaison est assurée par un cable de 10m comportant 10 paires torsadées en fils multi-brins, l'ensemble offrant une isolation suffisante pour le transport des tensions de commande en 220V.
Le système de commande du positionneur a été conçu autour d'un micro-controleur PIC18F2550 lequel dispose de toutes les fonctions requises en particulier les convertisseurs analogique/digital nécessaires à l'asservissement en position. La commande des moteurs s'effectue par le biais de triacs pilotés par des opto-coupleurs à détection de passage par le zéro.
Une logique de sécurité permet de garantir que les deux commandes de rotation d'un moteur ne seront jamais actionnées en même temps, même en cas de défaut dans le programme de commande. L'utilisation de relais statiques commerciaux n'a pas été ici possible de par la présence d'un réseau RC, dit 'snubber générant un courant de fuite de quelques milliampères suffisant pour actionner les moteurs sans toutefois provoquer leur accrochage.
La platine de commande de puissance n'a pu être installée dans le positionneur faute d'espace. Une commande en basse tension aurait alors nécessité l'adjonction d'un boîtier externe étanche et d'une signalisation de commande robuste. La très faible consommation de ces moteurs alliée à une protection dédiée m'a conduit à considérer, au moins dans un premier temps, une commande en 220V, la platine de puissance étant installée dans le boîtier de pilotage.
L'ensemble de commande est indépendant, et offre la possibilité de mémoriser localement dix positions. Une liaison série à 9600 bauds permet d'asservir le positionneur à un logiciel de poursuite, dans le cas présent, le logiciel Orbitron. Un pilote dédié assure le transfert des données Azimuth/Elevation calculées par Orbitron vers le positionneur.
Le système est en test depuis maintenant deux semaines dans le shack sans qu'aucun problème ne soit apparu. Il me faut maintenant construire un support mécano-soudé pour l'installation extérieure du positionneur, et réaliser une première antenne de test. Mon choix se porte actuellement sur une antenne de type hélice.






